








如果你是机器人爱好者,在观察过众多人形机器人的视频后可以发现,虽然具备人形,但机器人摔倒的模样可比孩子都要笨拙,有时起身同样也成问题。人类本身也会经常摔倒,但跟机器人的区别就在于,人类的反应神经非常灵敏,通过本能的反应可以让我们在摔倒的时候尽量避免严重的伤害。但对基于程序设定和机器人积累的机器人来说,形成“本能”还为时尚早。

现阶段人形机器人即使是面对摔倒等情况,反应的速度都非常慢,并且起身的模式非常固定。想要真正让机器人摔倒时更像个人,这就需要教它们如何优雅地摔倒,所以一种最新的算法出现了。
最近,来自佐治亚理工学院(Georgia Tech)的研究人员设计出了一种新的算法,可以用来教机器人如何正确地摔倒,起码不要在摔倒的时候对机器人本身造成严重的损伤。在读博士生Sehoo Ha与教授Karen Liu共同开发出了这种算法,能够让机器人在各种摔倒的情况下做出正确的反应。
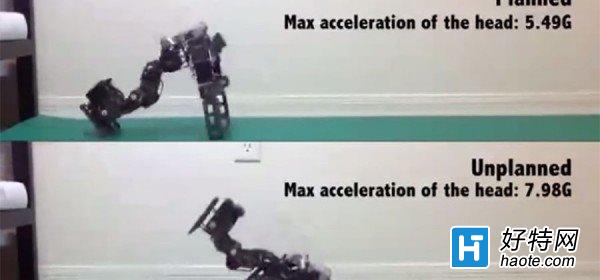
摔倒的情况包括被推、侧面摔倒等等,在运用这种算法之后,机器人就可以很大程度在摔倒后不受太大损伤。为了验证算法的有效性,研究人员既进行了物理模拟,也用BiolioGP人形机器人做了测试。
机器人对摔倒等情况进行优化,这本身并不是一个难以解决的问题,并且解决的方向也并不限于算法上的改进,还关于人形机器人的硬件设施能否做出及时、有效的动作。
Liu教授表示,研究团队知道机器人实际上是有能力在摔倒的过程中采取真正有效措施的,但缺乏配套的硬件令其快速做出动作回应。
机器人作为一个“能跑”“能动”的硬件,能否克服意外摔倒带来的影响一直是一个问题。再好的产品如果摔倒后就只能横躺等待救援,那产品本身也会变得鸡肋。
谷歌公司一直都在研发机器人,此前就发布了智能“Spot”机械狗,四脚着地虽说比人形机器人两脚着地稳定,但如何保持协调、稳固就是需要解决的问题。与针对人形机器人摔倒的算法一样,谷歌的这款机械狗最大的亮点在于不容易倒。可以看看以下这个视频。
小编推荐








手游风云榜
更多 












资讯阅读
更多 -

- 《热血江湖手游技能加点攻略》(掌握技能加点要诀,成就无敌江湖之王)
- 业内资讯 2025-05-21
-

- 新版本赏金玩法出装攻略(全面解析最优出装方案,让你在新版本赏金玩法中独领风骚)
- 业内资讯 2025-05-20
-

- 老鼠铲子出装铭文攻略(打造无敌老鼠!)
- 业内资讯 2025-05-20
-

- 王者太虚战场出装攻略(打造最强装备,征服太虚战场)
- 业内资讯 2025-05-19
-

- 制裁战神队友出装攻略(打造最强战队,击败敌人无往不胜)
- 业内资讯 2025-05-19
-

- 《狐狸端游联盟出装攻略》(狐狸出装攻略,助你战胜对手!)
- 业内资讯 2025-05-18
-

- 王者荣耀(揭开哪吒输出利器,带你稳定carry全场)
- 业内资讯 2025-05-18
-

- 地狱男爵技能加点攻略
- 业内资讯 2025-05-16
-

- 逐梦三国(揭秘孙权如何在起凡中成为绝对强者)
- 业内资讯 2025-05-16
-

- 《凯德出装铭文推荐攻略,助你稳定击败对手》
- 业内资讯 2025-05-13
-

- 护卫乌龟出装攻略(如何选择适合乌龟的护卫出装)
- 业内资讯 2025-05-11
-

- 《公主级2-6攻略技能大揭秘》(掌握攻略技能,成为公主级2-6的王者!)
- 业内资讯 2025-05-08